Participatory Design
Co-Designing Touch for CHORA Haptic Robot
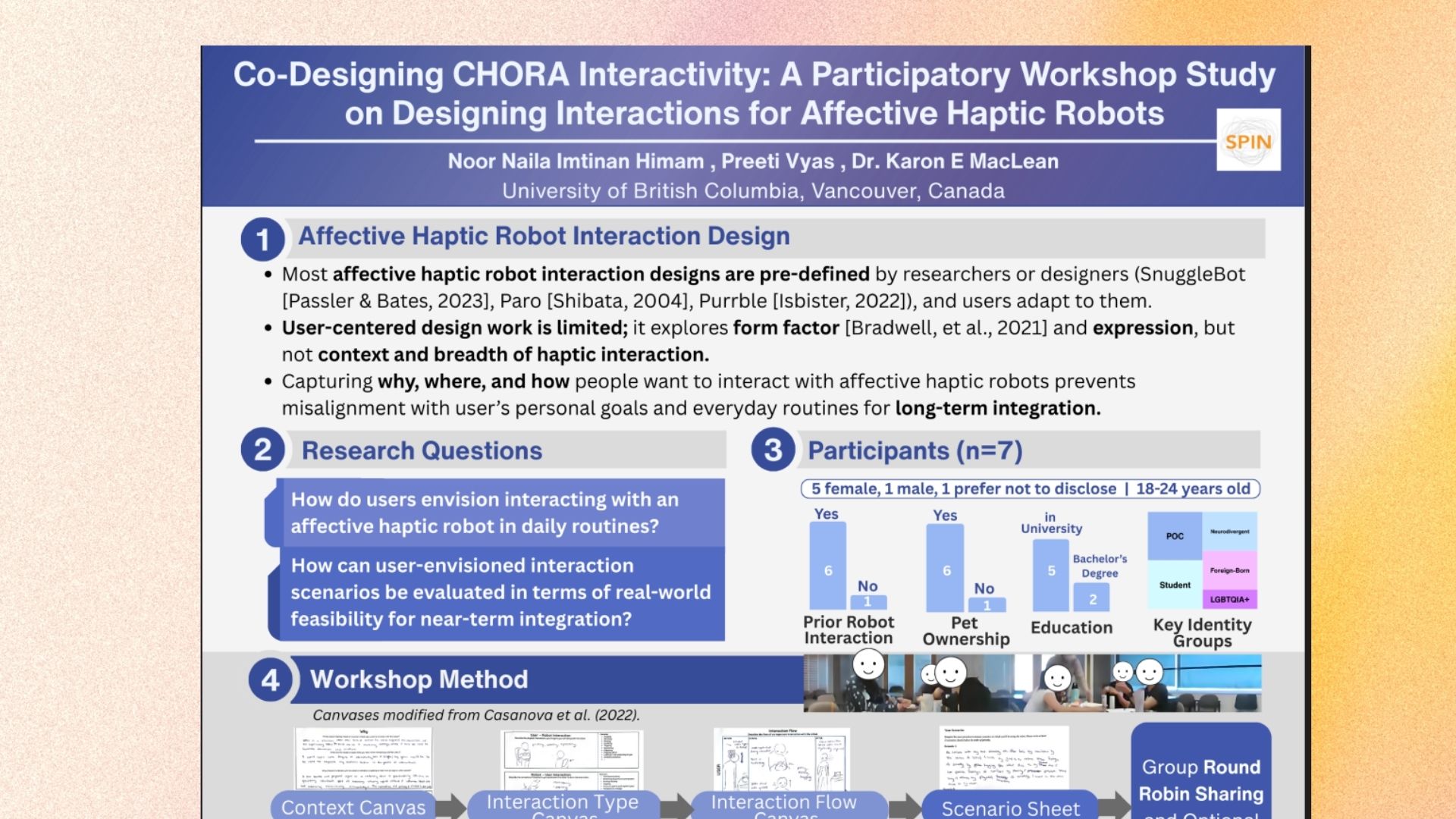
How do users envision interacting with an affective haptic robot in daily routines?
This research explores how users themselves envision interacting with CHORA, an affective haptic robot designed to provide comfort through touch. Unlike previous studies where affective robot interactions are pre-set by researchers or designers, this project uses participatory workshops to capture how people want to interact with haptic robots in their daily routines. Through structured canvases and scenario synthesis, participants co-designed interaction patterns that were then analyzed for themes and mapped into design implications, current solutions, and future requirements.
This project is part of a USRA (Undergraduate Student Research Award) fellowship at UBC's SPIN Lab, supervised by Dr. Karon E. MacLean, one of the world's leading researchers in haptic interaction design.
Most affective haptic robot interaction designs are pre-defined by researchers or designers. Robots like SnuggleBot, Paro, and Purrble have interactions that users simply adapt to. While some user-centered design work explores form factor and expression, very little research captures the context and breadth of haptic interaction from the user's perspective. This gap means designs risk misalignment with users' personal goals and everyday routines, undermining long-term adoption.
7
Workshop participants
4
Canvases per participant
5
Key identity groups
How can user-envisioned interaction scenarios be evaluated in terms of real-world feasibility for near-term integration?
Literature Review
Mapping the Affective Robot Landscape
Reviewed existing affective haptic robots (SnuggleBot, Paro, Purrble) and identified the gap: most interaction designs are researcher-defined, not user-envisioned. User-centered work exists for form factor but not for context and breadth of haptic interaction.
Workshop Design
Participatory Canvas Framework
Designed a multi-canvas workshop framework adapted from Casanova et al. (2022). Created four canvas types: Context Canvas (why, who, when, where), Interaction Type Canvas (how), Interaction Flow Canvas (sequence), and Scenario Synthesis sheets.
Recruitment
Diverse Participant Selection
Recruited 7 participants (18-24 years old, 5 female, 1 male, 1 prefer not to disclose) representing key identity groups: POC, neurodivergent, LGBTQIA+, student, and foreign-born. Most had no prior robot interaction experience but owned pets.
Workshops
Guided Canvas Sessions & Group Discussion
Participants individually filled canvases with guided prompts exploring interaction context (why, who, when, where) and how touch-based interactions should work and flow. This was followed by group round-robin sharing with optional revision, then individual scenario synthesis.
Analysis
Thematic Analysis & Design Mapping
Analyzed scenarios and canvases using thematic analysis to uncover interaction themes. Mapped findings into design implications, current solutions that already satisfy needs, and future requirements including missing technology and feasibility horizons.
Dissemination
USRA Poster & Ongoing Research
Presented findings through a USRA research poster at UBC. Findings contribute to the next phase of CHORA development at the SPIN Lab, informing interaction design decisions grounded in real user needs.
Participatory workshop study using a structured canvas framework (adapted from Casanova et al., 2022). Participants explored interaction contexts through guided prompts, then synthesized their ideas into narrative scenarios. The approach captures both the breadth of desired interactions and the contextual reasoning behind them.
Procedure
- 1Introduced CHORA through an introductory session with hands-on robot interaction
- 2Participants filled Problem Canvas to explore emotional and physical needs (why)
- 3Participants filled Environment Canvas to explore context (who, when, where)
- 4Participants filled Interaction Type and Flow Canvases to explore touch-based interaction patterns (how)
- 5Group round-robin sharing with optional revision of canvas entries
- 6Individual scenario synthesis combining all canvas insights into narrative scenarios
Context Canvas
Qualitative · Captures environment context: who is present, when and where interaction occurs
Interaction Canvases
Qualitative · Two canvases exploring interaction type (what kind of touch) and flow (sequence of interaction)
Scenario Sheets
Qualitative · Written narrative scenarios synthesizing context, need, interaction, and rationale
Thematic Analysis
Analysis · Coding and theme development from canvas data and scenarios
Relief from Negative Emotions
Participants envisioned CHORA helping with stress, sadness, anxiety, and overstimulation. The robot serves as a non-judgmental presence during emotional distress.
Stronger Comfort and Desire for Private Use
Users wanted interactions to be more intentional and immersive in private settings, suggesting deeper emotional engagement when alone.
Physical and Tactile Comfort
Touch, pressure, and haptic feedback emerged as central to desired interactions. Users wanted the robot to provide physical sensations similar to petting or being held.
Facilitating Relaxation and Sleep
A major use case was bedtime/wind-down routines. Participants wanted CHORA to help with relaxation and sleep through gentle rhythmic movements and warmth.
Others as Facilitator Only
When others are present, CHORA remains personal. Participants wanted the robot to be a bridge for comfort without making others the primary source.
Low Emotional Commitment and Judgement
Unlike human interaction, CHORA was valued for being non-judgmental, safe, and private. Users appreciated the low emotional overhead of interacting with a robot.
Literature & Gap Identification
Mapped the landscape of affective haptic robots (SnuggleBot, Paro, Purrble) and identified that user-centered interaction design for haptic robots remains underexplored beyond form factor.
Canvas Framework Design
Adapted the Context Canvas framework from Casanova et al. (2022) into a multi-canvas workshop protocol covering problem, environment, interaction type, and interaction flow.
Pilot Workshop
Ran initial sessions to refine canvas prompts, timing, and group discussion flow. Adjusted guided prompts to better elicit rich interaction scenarios.
Full Participatory Workshops
Conducted workshops with 7 participants representing diverse identity groups. Collected rich qualitative data through canvases, group discussions, and scenario synthesis.
Thematic Analysis & Design Mapping
Analyzed data using thematic analysis. Mapped themes into design implications, identified existing solutions, and projected future requirements for CHORA's interaction design.
Bottom-up design reveals unexpected needs
Letting users envision their own interactions rather than evaluating pre-defined ones surfaced needs that researchers might never anticipate, like the importance of low emotional commitment and the distinction between private and social use.
Participatory methods for sensitive topics
Designing workshops around emotional and physical comfort requires careful facilitation. The canvas framework provided enough structure to guide participants while leaving space for personal, sometimes vulnerable, reflections.
Bridging HRI research and real-world integration
Learned to evaluate interaction scenarios not just for desirability but for technical feasibility, mapping findings against current robotic capabilities and identifying what future technology must support.
Working within a world-class research lab
Collaborating with Dr. Karon E. MacLean and the SPIN Lab team deepened my understanding of haptic interaction research, experimental rigor, and how to position my work within a broader research program.